



一、服务简介
1.项目背景
随着自动驾驶和高级驾驶辅助系统(ADAS)技术的快速发展,对实时视频流处理和高效目标检测的需求日益迫切。传统的CPU和GPU解决方案虽然能够处理复杂的计算任务,但在功耗、实时性和硬件集成度方面存在局限性。FPGA(现场可编程门阵列)作为一种高性能并行计算平台,具有低功耗、高实时性和可编程性强等特点,非常适合用于视频流处理和目标检测任务。因此,本项目旨在利用FPGA技术,开发一个高效、实时的视频流处理及目标检测系统,以满足自动驾驶和ADAS技术的需求。
2.服务内容
本项目的服务内容是开发一个基于FPGA的视频流处理及目标检测系统,该系统能够实时处理来自汽车摄像头的视频流,并利用YOLO(YouOnlyLookOnce)算法进行目标检测。系统可以实现以下目标:
(1)实时解码视频流,并将其转换为适合YOLO算法处理的格式。
(2)在FPGA上实现YOLO算法的推理,输出目标物体的类别、位置和置信度。
(3)通过通信接口将检测结果实时传输给上层系统或显示屏。
(4)优化系统性能和功耗,以适应汽车应用场景的实时性和低功耗要求。
3.系统架构概述
本项目开发的系统架构主要包括三个模块:视频处理模块、YOLO推理模块和通信接口模块。
3.1视频处理模块:负责接收来自汽车摄像头的视频流,进行解码和格式转换,将视频帧传递给YOLO推理模块。
3.2YOLO推理模块:在FPGA上实现YOLO算法的推理过程,包括卷积运算、激活函数、非极大值抑制等步骤,输出目标检测结果。
3.3通信接口模块:负责将YOLO推理模块输出的检测结果通过通信接口(如AXI总线、SPI或Ethernet)传输给上层系统或显示屏。
二、功能与设计
1.硬件功能
1.1FPGA设备
选用如 Xilinx 的 ZynqUltrascale + 系列或 Intel 的 Arria 系列等支持高速视频流数据处理和深度学习推理的 FPGA 设备。设备需集成充足的 DSP 单元、BRAM 和高速接口,满足视频处理和深度学习推理需求。
1.2摄像头输入
系统支持 MIPICSI 或 LVDS 等常用汽车摄像头接口,摄像头能提供 1080p 或 720p 分辨率的实时视频流输入。
1.3存储器
配备足够的片上存储器(BRAM)或外部 DDR4 存储器,用于存储视频帧缓冲区和 YOLO 算法模型参数。存储器的大小和带宽依据系统实时性和性能需求选定。
2.软件功能与设计
2.1视频处理模块:开发视频解码固件,将摄像头输入的视频流解码成适合 YOLO 算法处理的图像帧格式,同时实现图像缩放、裁剪和归一化等预处理功能。
2.2 YOLO推理模块:支持 YOLOv3 或 YOLOv4 模型推理,以及 FPGA 上定制化优化的 YOLO 卷积神经网络模型(包括 INT8 量化),实现物体边界框输出。
2.3通信接口:开发通信接口固件,实现 FPGA 与上层系统间的数据传输。通信接口支持 AXI 总线、SPI 或 Ethernet 等常用通信协议,能实时传输检测结果。
3.功能需求详细说明
3.1视频解码
输入:摄像头视频流。系统支持从汽车摄像头接收实时视频流输入。
输出:解码后的图像帧。视频解码器将接收到的视频流解码为适合后续YOLO目标检测算法处理的图像帧格式。
帧率要求:10fps(帧每秒)。系统解码后的图像帧以不低于10fps的速率输出。
延迟要求:解码到YOLO推理的延迟可控制在300ms以内。从视频流解码开始到YOLO算法开始处理图像帧的时间间隔小于300毫秒。
3.2 YOLO目标检测
输入:解码后的图像帧。YOLO算法接收解码器输出的图像帧作为输入。
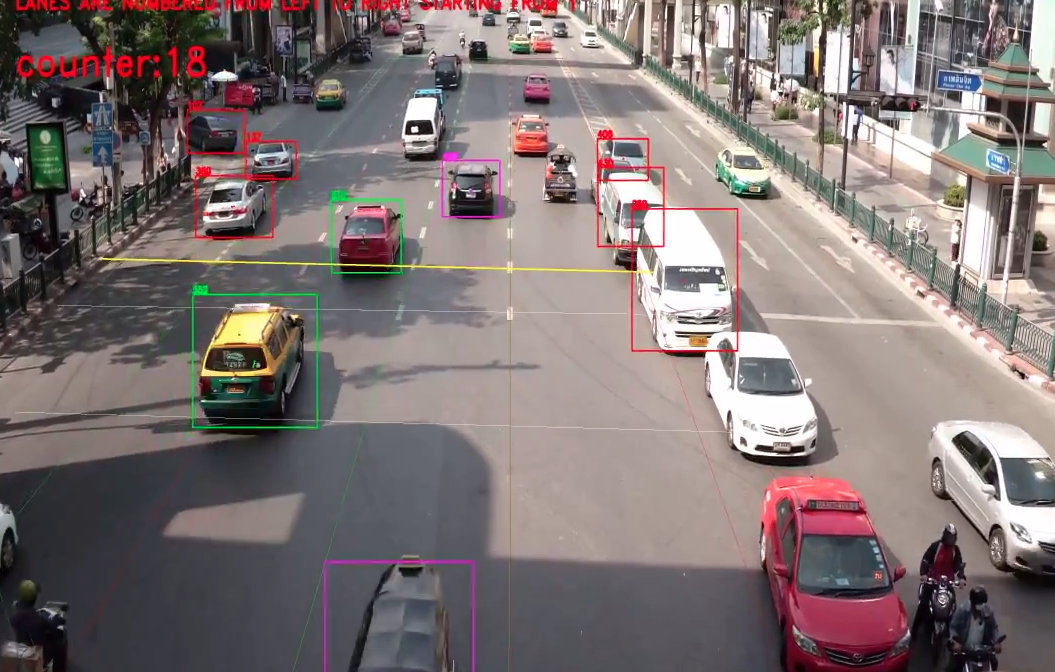
输出:检测结果,包括物体类别、边界框位置(x,y,w,h)和置信度。YOLO算法需输出检测到的物体信息,包括类别标签、边界框的坐标和宽度高度以及置信度分数。
检测类别:车辆、行人、自行车、交通标志等。系统能够检测这些常见的交通目标。
性能要求:
(1)处理帧率要求:10fps。YOLO算法以不低于10fps的速率处理图像帧并输出检测结果。
(2)检测准确率要求:达到YOLO模型的预期水平,mAP(平均精度均值)在70%以上。
3.3 通信接口
接口要求:AXI、SPI或Ethernet。系统支持这些通信接口之一,用于将检测结果传输给上层系统或显示屏。
通信数据:包含检测的物体信息,格式为JSON或二进制格式。系统将检测结果封装为JSON或二进制格式的数据包进行传输。
输出刷新率:实时输出检测数据(帧率不低于10fps)。系统通信接口以不低于10fps的速率实时输出检测结果。
4. 性能需求
延迟:系统解码到目标检测的整体延迟不超过100ms。从视频流输入到YOLO算法输出检测结果的整体时间间隔需小于100毫秒,以满足实时性要求。
功耗:FPGA电路设计需考虑功耗优化,以适应汽车应用需求。系统在设计阶段就注重功耗控制,采用低功耗的FPGA器件和电路设计,以满足汽车应用对功耗的严格要求。
稳定性:系统需在不同环境下(40℃至85℃)稳定工作。系统经过严格的温度测试,确保在极端温度条件下仍能正常工作,满足汽车应用对稳定性的要求。
5.开发要求
5.1 FPGA固件开发
(1)视频解码固件
功能:实现视频流的解码及格式转换。固件能够接收来自摄像头的原始视频流,并将其解码为适合YOLO模型处理的图像格式(如YUV或RGB)。
要求:解码过程需高效且稳定,确保视频流的连续性和实时性。
(2)YOLO推理固件
功能:实现YOLO模型的卷积网络、激活函数、非极大值抑制(NMS)等关键步骤。固件能够接收解码后的图像帧,并输出目标检测结果(包括类别、边界框位置和置信度)。
要求:充分利用FPGA的并行处理能力,优化YOLO推理过程,提高帧率。
(3)通信接口固件
功能:提供接口通信并输出检测结果。固件需能够将YOLO推理模块输出的检测结果通过指定的通信接口(如AXI、SPI或Ethernet)传输给上层系统或显示屏。
要求:确保通信接口的稳定性和实时性,实现检测数据的实时传输。
5.2 软件开发
(1)驱动开发
功能:开发FPGA视频解码和YOLO推理的驱动。驱动能够与FPGA固件进行交互,实现视频流的解码、YOLO模型的推理以及检测数据的传输等功能。
(2)数据处理模块
功能:将通信接口的数据进行转换,以供上层系统使用。模块需能够接收来自通信接口的检测数据,并进行必要的格式转换和数据处理,以便上层系统能够正确地解析和使用这些数据。
(3)测试工具
功能:提供测试工具用于调试视频流输入和目标检测结果的验证。测试工具需能够方便地输入视频流数据、接收检测数据并进行验证和比较等操作。
5.3优化策略与措施
(1)算法优化
基于FPGA硬件架构优化YOLO推理过程:通过定制化的硬件加速模块实现YOLO模型的卷积运算、激活函数和非极大值抑制等操作,提高帧率。
YOLO模型的参数量化和权重压缩:对YOLO模型进行参数量化和权重压缩操作,以减少模型的存储空间和计算量,进一步提高推理效率。
(2)性能优化
视频解码效率提升:优化视频解码算法和流程,减少解码延迟和资源占用,提高视频流的实时性和稳定性。
目标检测模块利用FPGA硬件资源实现高效的推理:充分利用FPGA的并行处理能力和定制化硬件资源,实现高效的YOLO推理过程。
6. 验收标准
6.1功能验证
视频解码模块:成功解码视频流,图像清晰无失真。
YOLO推理模块:能够正确检测目标物体,并返回准确的边界框和类别信息。
通信接口模块:检测数据能够实时传输至上层系统或显示屏,无数据丢失或延迟。
6.2性能验证
整体延迟:从视频流输入到目标检测结果输出的整体延迟不超过300ms。
检测帧率:系统能够以不低于10fps的帧率进行目标检测。
mAP:目标检测的平均精度均值(mAP)不低于70%。
6.3环境适应性测试
温度适应性:系统在不同温度环境下(40℃至85℃)稳定运行,无性能下降或故障。
光照适应性:系统在不同光照条件下(如强光、弱光、逆光等)保持稳定的检测性能。
三、创新性内容
1.FPGA终端硬件上的YOLO目标识别部署
1.1低功耗优势
与GPU、CPU等传统计算单元相比,FPGA在运行人工智能算法时具有显著的低功耗优势。FPGA通过硬件加速,实现了算法的高效执行,同时降低了能耗。这一特点使得FPGA成为汽车车辆部署及实时动态交通目标检测识别应用的理想选择,因为汽车系统对功耗有着严格的要求。
1.2算法框架灵活性强
FPGA具有高度的可编程性和灵活性,能够支持多种算法框架的部署。在本项目中,我们成功地将YOLO目标识别算法部署在FPGA上,并展示了其强大的算法框架灵活性。这意味着,未来可以根据实际需求,轻松地调整和优化算法,以适应不同的应用场景。
1.3便于迭代
FPGA的硬件加速特性不仅提高了算法的执行效率,还使得算法迭代变得更加便捷。通过简单的编程和配置,就可以实现算法的快速迭代和优化,从而满足不断变化的应用场景需求。
2.YOLO目标识别算法的量化与剪枝技术创新
2.1量化处理
在本项目中,我们针对YOLO目标识别算法进行了量化处理。量化是一种有效的模型压缩方法,通过降低模型参数的精度(如从32位浮点数降低到8位整数),可以显著减少模型的存储空间和计算量。同时,量化处理还可以在一定程度上保持模型的准确性,使得模型在FPGA上实现高效推理成为可能。
2.2剪枝技术
除了量化处理外,我们还采用了剪枝技术来优化YOLO目标识别算法。剪枝是一种通过移除神经网络中不重要的连接或节点来减少模型复杂度的方法。通过剪枝,我们可以进一步降低模型的计算量和存储空间需求,同时保持模型的性能。这种技术使得YOLO算法在FPGA上的实现更加高效和实用。
3.端侧AI推理的实现
3.1实时性
基于FPGA的端侧AI推理实现了实时动态交通目标检测识别。通过FPGA的硬件加速和算法优化,系统能够在高帧率下实时处理视频流并输出检测结果。这一特点使得系统能够及时响应交通变化,为自动驾驶和ADAS技术提供有力的支持。
3.2部署便捷性
端侧AI推理的实现还带来了部署上的便捷性。由于FPGA具有体积小、功耗低、易于集成等特点,因此可以方便地部署在汽车车辆上。这大大降低了系统的部署难度和成本,同时提高了系统的可靠性和稳定性。
4.适配于汽车车辆部署及实时动态交通目标检测识别应用
本项目所开发的基于FPGA的视频流处理及目标检测系统,特别适用于汽车车辆部署及实时动态交通目标检测识别应用。系统能够在高帧率下实时处理视频流并输出准确的检测结果,为自动驾驶和ADAS技术提供了有力的技术支撑。同时,系统的低功耗、高可靠性和易于部署等特点也使得其成为汽车行业的理想选择。
综上所述,本项目在基于FPGA的视频流处理及目标检测开发方面实现了多项技术创新和突破。这些创新不仅提高了系统的性能和效率,还降低了系统的功耗和成本,为自动驾驶和ADAS技术的发展提供了有力的支持。
四、收费标准
本项目的收费将依据研发工作量以及具体的功能技术指标水平来确定,预计费用范围在 50 - 100 万之间。由于项目的复杂性和特殊性,具体价格面议。在评估研发工作量时,会综合考虑从硬件选型与集成、软件模块开发、功能实现与优化,到严格的测试与验收等各个环节所涉及的人力、时间和资源投入。对于功能技术指标水平的衡量,则包括但不限于视频解码的准确性与帧率、YOLO 推理的检测准确率(mAP)和处理帧率、通信接口的稳定性和数据传输速率,以及系统在不同环境条件下(如温度范围在 40℃至 85℃、各种光照条件)的性能表现等多方面因素。
五、服务团队
中国科学院上海高等研究院-智能信息通信技术研究与发展中心-智能通信实验室团队。中国科学院上海高等研究院是由中国科学院与上海市人民政府共建的科研机构,围绕上海科创中心以及张江实验室的建设,重点关注原始创新和集成创新研究,主要研究领域包括信息与电子技术、能源与环境技术、新材料技术等。申请团队所在的智能信息通信技术研究与发展中心(以下简称“中心”)整合了院内信息领域的优势资源,面向国家重大需求和国际前沿领域,致力于先进移动通信、传感与计算、协同感知及智能控制等研究,研究领域包括NGB技术、脑-机接口通信、5G和B5G移动通信、图像传感与自动驾驶、大数据计算和人工智能、城市大脑等。中心在无线通信和大数据智能领域深耕多年,在信号与通信系统、未来通信关键技术、5G网络架构、大数据分析处理平台和算法等研究邻域有丰富的成果。
中国科学院上海高等研究院(简称“高研院”)是由中国科学院和上海市人民政府共建的科研机构,坐落于中国科学院上海浦东科技园,筹建于2008年,2012年11月通过验收正式成立。高研院积极开展原始创新和集成创新研究,加强与海内外研发机构、大学和企业的合作,集聚海内外杰出学者,促进我国相关战略新兴产业发展成为技术引领者,加快科学技术成果转移转化。实践科技与经济、科技与教育、科技与金融、科技与文化的四结合,成为有国际竞争力的集研、产、学、用为一体的多学科交叉综合性科教机构,为国家和区域经济增长方式转变提供相关领域的技术支撑与决策支持。 高研院在信息、能源环境、生命健康、交叉前沿与先进制造等领域布局,突破核心技术,形成一批重大科研成果,探索科技与经济、教育、金融、文化的融合发展模式,呈现出蓬勃发展的良好局面。在未来五至十年,高研院将以智慧城市关键技术及应用,低碳复合能源系统解决方案、核心技术和重大装备,温室气体控制及解决方案三个重大突破为目标,将能量高效储存与转化、一体化信息融合网络、资源综合利用及高值化、碳数据与碳评估平台和交叉前沿与干细胞3D打印作为五个重点培训方向大力发展科研及其应用。



